A Fast Single Image Haze Removal Algorithm Using Color Attenuation Prior——基于颜色衰减先验单图片去雾算法原理
2016-03-17 12:20
477 查看
本人最近在研究去雾方面的最新文献(2016年初),当然去雾方面的经典论文是何凯明博士的《Single Image Haze Removal Using Dark Channel Prior》,我这里讲的论文主要是自己平时在看的一些文献,看的过程中进行总结,一方面是给自己看论文留下一点可参考的东西,另一方面希望能对各位产生帮助。可能有些地方不尽如人意,不喜勿喷。
[b]一、专业词汇:[/b]
raw depth map:由雾图恢复过来的深度图,如图1所示
blocking artifacts:块效应,如图2所示
transmission maps:去雾要删掉的图,如图3所示
airlight:大气散射光
[b]二、颜色衰减先验[/b]
这篇文章提出了一种新的先验——颜色衰减先验。首先讲讲什么是颜色衰减先验:
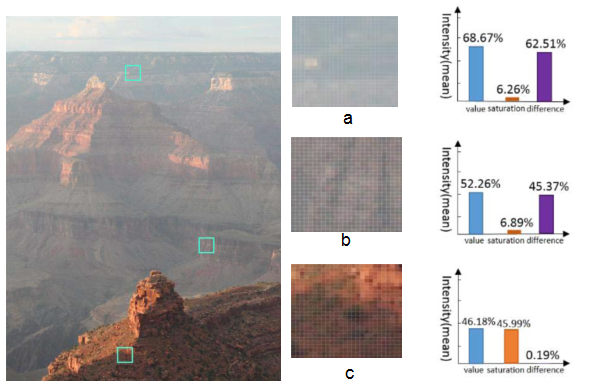
通过对雾霾图的场景深度建模(线性模型),它是说图像的深度和亮度,饱和度之间存在线性关系。如上图所示,c区域为近景无雾部分,b区域远近适中,有一定雾,a区域为远景雾气浓重。由c右边图表可知,c图的亮度46.18%,饱和度很高,两者几乎没差。通过图表的比较可以得出以下几个结论:1.饱和度很容易受雾气的影响,一旦有一点雾,下降的很快。2.亮度在有雾的情况下(有散热光)反而会更亮。3.无雾情况下,亮度和饱和度几乎没差,受雾的影响下,亮度和饱和度之差悬殊。并且雾越浓重,两者相差越悬殊,也就是说亮度和饱和度之差和雾浓度正相关。
基于场景深度和雾浓度的关系,我们可以推出:
深度和亮度与饱和度之差正相关!
于是有 d(X)=θ0+θ1v(X)+θ2s(X)+ε(X).
[b]三、计算θ0,θ1,θ2和σ2的值[/b]
d(X)=θ0+θ1v(X)+θ2s(X)+ε(X),
d是深度,v是亮度,s是饱和度。θ0,θ1,θ2线性系数。ε(X)是随机变量表示模型的随机错误。可以把ε当做随机图。
我们让ε(X)~ N(0,σ2),得d(X)-θ0-θ1v(X)-θ2s(X)~N(0,σ2) ---->d(X)~N(θ0+θ1v+θ2s,σ2)
明确问题:亮度v,饱和度s已知,需要计算θ0,θ1,θ2,σ的值,关键在于深度d目前不可测量于是有了以下方法。
a.合成图像数据集
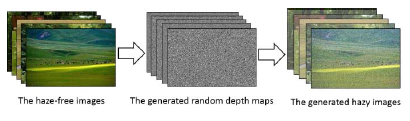
因为测量图片的深度比较困难,没有量化的方法(即d未知)。受唐在<<Investigating haze-relevant features in a learning framework for image dehazing>>文中的方法。根据大气散射模型:I(X) = J(X)t(X)+A(1-t(X)),t(X) = e-βd(X),β散射系数跟大气情况有关。本文采用:清晰无雾图 + 随机深度图 【服从(0,1)均匀分布】+随机大气光A= 样本雾图
第一,对每一张清晰图,我们都产生一张相同大小的随机深度图,合成深度图的像素值服从在开区间(0,1)的标准均匀分布,即A(1-t(X))。第二,产生0.85<k<1的随机大气光A,最后我们用随机深度图d和随机大气光A合成有雾图。我们使用500张无雾图作为训练样本。
b.最大似然估计
对于联合概率密度函数,我们假设每个像素出错的概率是独立的,可得:

对该式做最大似然估计,两边同时取以e为底的log,然后化简对θ0,θ1,θ2,σ分别做协方差求极值得:

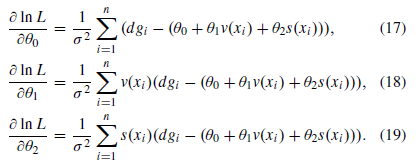
根据公式(16)-(19),采用梯度下降算法去计算θ0,θ1,θ2的值
本文用了500个训练样本和1.2亿像素点训练线性模型。经过517代最后得出的最好系数θ0=0.121779,θ1=0.959710,θ2=-0.780245,σ=0.041337。确定了相关系数,我们就可以用来恢复有雾图的深度。
四、深度图恢复
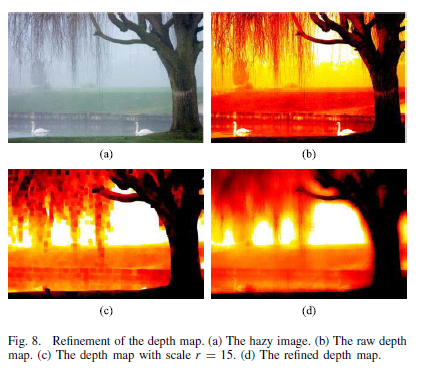
b就是由a恢复的深度图,称为raw depth map.黑色景物比较近,白色比较远。图b就出现了"白鹅效应",图中的白鹅本身是比较近的,但由于其本身就是白色,误认为是远景,这会影响结果的准确性。

我们取在以遍历的某像素x为中心的r*r图像区域内的最小值,结果如图c所示,有效解决但是出现了块效应。最后才经过导向滤波得到图d.
[b]五、清晰图恢复[/b]
通过d,A和公式1,2恢复场景J。为了抑制噪声,t(X)选取0.1-0.9之间。--- ①
I(X) = J(X)t(X)+A(1-t(X)), --- ②
t(X) = e-βd(X) --- ③
1、由②③可知在深度图中的白色区域深度无限深,所以I(X)=A,所以本文直接选取深度图中0.1%亮度像素,选取亮度最集中的一块作为大气光A。
2、由①②③得出公式:

有了该公式于是可以对J(X)无雾图进行恢复已达到目标结果。
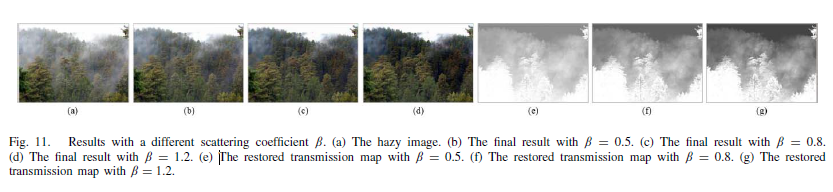
散射系数β表示大气朝各个方向散射光的单位体积的能力。换句话说,间接决定了去雾的强度。
图11(e-g)不同β的transmission maps,(b-d)是相应去雾结果。可以看出,β太小去雾效果不好,而β太大则去雾过渡(图d变黑)。因此选取合适的β非常重要。大多数情况β=1.0去雾效果已经足够了。
[b]一、专业词汇:[/b]
 图1 |  图2 |
 图3 | 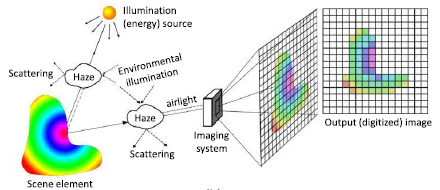 图4 |
blocking artifacts:块效应,如图2所示
transmission maps:去雾要删掉的图,如图3所示
airlight:大气散射光
[b]二、颜色衰减先验[/b]
这篇文章提出了一种新的先验——颜色衰减先验。首先讲讲什么是颜色衰减先验:
通过对雾霾图的场景深度建模(线性模型),它是说图像的深度和亮度,饱和度之间存在线性关系。如上图所示,c区域为近景无雾部分,b区域远近适中,有一定雾,a区域为远景雾气浓重。由c右边图表可知,c图的亮度46.18%,饱和度很高,两者几乎没差。通过图表的比较可以得出以下几个结论:1.饱和度很容易受雾气的影响,一旦有一点雾,下降的很快。2.亮度在有雾的情况下(有散热光)反而会更亮。3.无雾情况下,亮度和饱和度几乎没差,受雾的影响下,亮度和饱和度之差悬殊。并且雾越浓重,两者相差越悬殊,也就是说亮度和饱和度之差和雾浓度正相关。
基于场景深度和雾浓度的关系,我们可以推出:
深度和亮度与饱和度之差正相关!
于是有 d(X)=θ0+θ1v(X)+θ2s(X)+ε(X).
[b]三、计算θ0,θ1,θ2和σ2的值[/b]
d(X)=θ0+θ1v(X)+θ2s(X)+ε(X),
d是深度,v是亮度,s是饱和度。θ0,θ1,θ2线性系数。ε(X)是随机变量表示模型的随机错误。可以把ε当做随机图。
我们让ε(X)~ N(0,σ2),得d(X)-θ0-θ1v(X)-θ2s(X)~N(0,σ2) ---->d(X)~N(θ0+θ1v+θ2s,σ2)
明确问题:亮度v,饱和度s已知,需要计算θ0,θ1,θ2,σ的值,关键在于深度d目前不可测量于是有了以下方法。
a.合成图像数据集
因为测量图片的深度比较困难,没有量化的方法(即d未知)。受唐在<<Investigating haze-relevant features in a learning framework for image dehazing>>文中的方法。根据大气散射模型:I(X) = J(X)t(X)+A(1-t(X)),t(X) = e-βd(X),β散射系数跟大气情况有关。本文采用:清晰无雾图 + 随机深度图 【服从(0,1)均匀分布】+随机大气光A= 样本雾图
第一,对每一张清晰图,我们都产生一张相同大小的随机深度图,合成深度图的像素值服从在开区间(0,1)的标准均匀分布,即A(1-t(X))。第二,产生0.85<k<1的随机大气光A,最后我们用随机深度图d和随机大气光A合成有雾图。我们使用500张无雾图作为训练样本。
b.最大似然估计
对于联合概率密度函数,我们假设每个像素出错的概率是独立的,可得:
对该式做最大似然估计,两边同时取以e为底的log,然后化简对θ0,θ1,θ2,σ分别做协方差求极值得:
根据公式(16)-(19),采用梯度下降算法去计算θ0,θ1,θ2的值
/* *Input: the training brightness vector v,the training saturation vector *s,the training depth vector d,and the number of iteration t *Output:linear coefficients θ0,θ1,θ2,the variable σ2 *Auxiliary functions: * function for obtaining the size of the vector: n=size(in) * function for calculating the square: out=square(in) */ Begin n=size(v); θ0=0;θ1=1;θ2=-1; sum=0;wSum=0;vSum=0;sSum=0; for iteraiton from 1 to t do for index from 1 to n do temp=d[i]-θ0-θ1*v[i]-θ2*s[i]; wSum=wSum+temp; vSum=vSum+v[i]*temp; sSum=sSum+s[i]*temp; sum=sum+square(temp); end for σ2=sum/n; θ0=θ0+wSum;θ1=θ1+vSum;θ2=θ2+sSum; end for End
本文用了500个训练样本和1.2亿像素点训练线性模型。经过517代最后得出的最好系数θ0=0.121779,θ1=0.959710,θ2=-0.780245,σ=0.041337。确定了相关系数,我们就可以用来恢复有雾图的深度。
四、深度图恢复
b就是由a恢复的深度图,称为raw depth map.黑色景物比较近,白色比较远。图b就出现了"白鹅效应",图中的白鹅本身是比较近的,但由于其本身就是白色,误认为是远景,这会影响结果的准确性。
我们取在以遍历的某像素x为中心的r*r图像区域内的最小值,结果如图c所示,有效解决但是出现了块效应。最后才经过导向滤波得到图d.
[b]五、清晰图恢复[/b]
通过d,A和公式1,2恢复场景J。为了抑制噪声,t(X)选取0.1-0.9之间。--- ①
I(X) = J(X)t(X)+A(1-t(X)), --- ②
t(X) = e-βd(X) --- ③
1、由②③可知在深度图中的白色区域深度无限深,所以I(X)=A,所以本文直接选取深度图中0.1%亮度像素,选取亮度最集中的一块作为大气光A。
2、由①②③得出公式:
有了该公式于是可以对J(X)无雾图进行恢复已达到目标结果。
散射系数β表示大气朝各个方向散射光的单位体积的能力。换句话说,间接决定了去雾的强度。
图11(e-g)不同β的transmission maps,(b-d)是相应去雾结果。可以看出,β太小去雾效果不好,而β太大则去雾过渡(图d变黑)。因此选取合适的β非常重要。大多数情况β=1.0去雾效果已经足够了。

相关文章推荐
- Django--ajax
- 深度学习工程师:为什么AlphaGo难取胜?这是在取胜之前说的。
- go语言数组的拷贝
- Django session 详解
- ongodb内存管理和使用情况情况查询
- Django配置Session的3种存储方法
- Gonsion携手3M触控推出2K和4K多点触摸屏显示器(32寸,42寸,46寸,55寸,65寸)C2137PW | C3237PW | C4237PW | C4637PW | C 5537PW |C
- Google自己的下拉刷新组件SwipeRefreshLayout
- 使用GDI+绘制的360风格按钮控件(使用CN_DRAWITEM消息重绘,并使用TGPGraphics,TGPPen,TGPImage,TGPBitmap等)good
- Go初探
- 遗传算法Genetic Algorithm
- 编写GO的WEB开发框架 (十三): 配置文件读取
- go源码阅读笔记(math.2)
- 十.导入django-crispy-form并完善增加数据页面
- 搜索引擎倒排索引表压缩:gamma编码、Golomb编码
- git - Trying to create a local repo of go.tools that is go get-able - Stack Overflow
- golang 学习笔记
- AlphaGO赢了,但与“划时代”无关
- 事实上,最糟的并不是李世石完败AlphaGo......
- Django 开发Tutorial part_3