无权最短路径
2015-11-17 22:14
411 查看
【0】README
0.1) 本文总结于 数据结构与算法分析, 源代码均为原创, 旨在理解 无权最短路径 的思想并用源代码加以实现;【1】无权最短路径相关概念(边的权值赋值为1)
1.1)概述:下图就是表示一个无权图G。使用某个顶点s作为输入参数, 我们想要计算 从s到所有其他顶点的最短路径;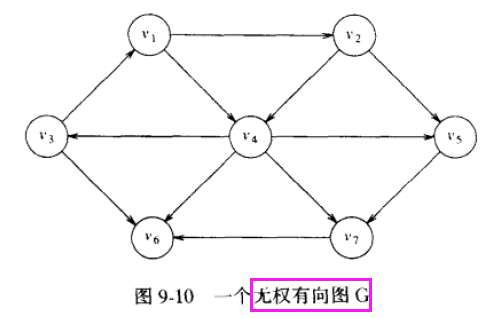
1.2)0路径:若我们选择s 为 v3,此时立刻可以说出从s 到v3的最短路径是0路径;
1.3)算法描述:
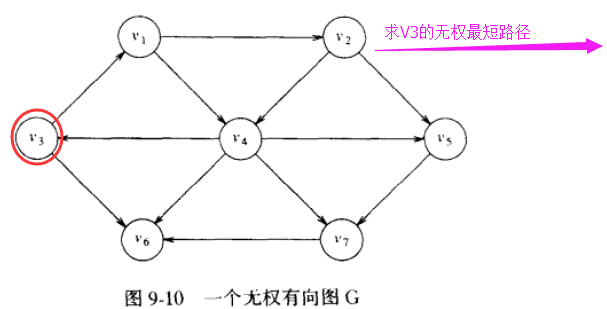
step1)寻找所有与s 距离为 1 的顶点, 此时我们看到 v1和v6 与s只有一边之遥;
step2)寻找所有与s 距离为 2 的顶点, 即找出所有邻接到 v1 和 v6的顶点(与v1和v6 距离为1的顶点), 得到v2和v4, 所以v1到v2或者v4的距离为2;
……
step3)循环这个过程,直到所有的顶点都被遍历到;
Conclusion)以上搜索过程称为广度优先搜索
广度优先搜索)该方法按层处理顶点: 距开始点最近的 那些顶点首先被赋值, 而最远的那些顶点最后被赋值, 这很像对树的层次遍历;
【2】如何实现上述算法?
2.1)对于每个顶点, 我们将跟踪三个信息(info):I1)dv栏(distance):我们把从s开始到顶点的距离放到 dv栏中,开始的时候,除开s所有的 顶点都是不可达到的,而s的路径长为0;
I2)pv栏(path): pv栏中的项为薄记变量, 它将使我们能够显示出实际的路径;
I3)known栏: Known中的项点被处理后置为1;
2.2)开始,所有的顶点都不是 Known,包括开始顶点。当一个顶点被标记为已知是, 我们就确信不会再找到更便宜的路径,因此对该顶点的处理实质上已经完成了;
【3】我们使用类似于 拓扑排序的做法来提供寻找无权最短路径算法的性能
3.1)算法描述:在任一时刻, 只存在两种类型的未知顶点,他们的dv≠∞, 一些顶点的dv=CurrDist, 而其余的则有 dv=CurrDist+1;3.2)使用队列把这种想法进一步精化: 在迭代开始的时候, 队列只含有距离为CurrDist的那些顶点。当我们添加距离为 CurrDist+1的那些邻接顶点时, 由于它们自队尾入队, 因此这就保证了它们直到所有距离为 CurrDist 的顶点都被处理后才被处理。在距离为 CurrDist处的最后一个顶点出队并被处理之后, 队列只含有距离为 CurrDist+1的顶点, 因此该过程将不断进行下去。 我们只需要把开始的节点放入队列中以启动这个过程即可;
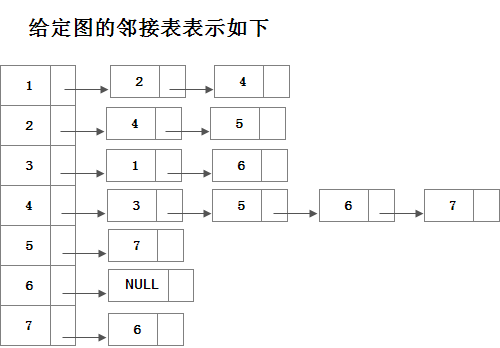
3.3)时间复杂度: 只要使用邻接表, 则运行时间就是 O(|E| + |V|);
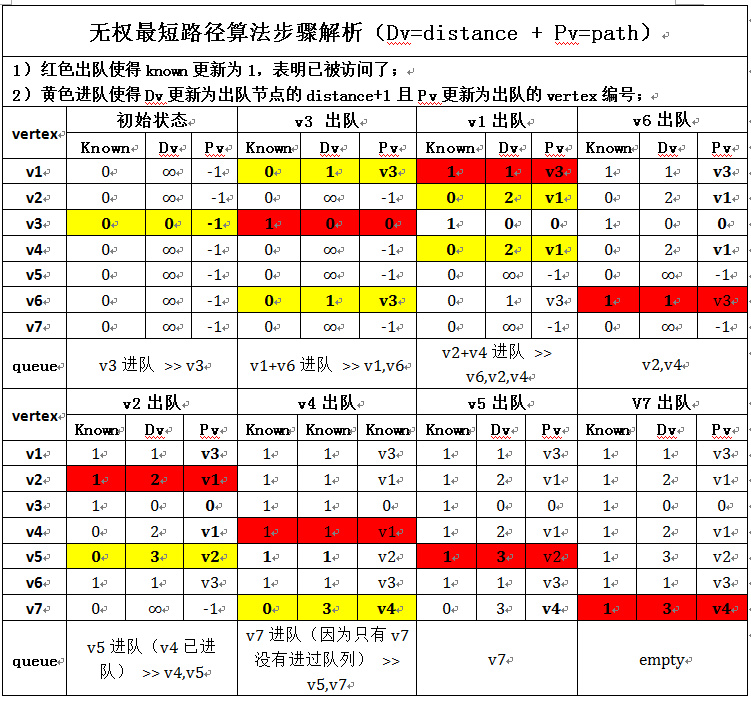
3.4)无权最短路径算法实例图如下:
(显然, 某顶点出队后, 更新其相应的known为1;再查找出队顶点vertex的邻接顶点,如果有的话,将他们依次入队,依次更新distance自增1且path路径更新为出队顶点vertex的顶点编号)
 |  |
【4】source code + printing results
4.1)download source code:https://github.com/pacosonTang/dataStructure-algorithmAnalysis/tree/master/chapter9/p224_unweighted_shortest_path
4.2)source code at a glance (for full code, please download source code following the given link above):
#include "unweightedTable.h"
// allocate the memory for every element in unweighted table
UnweightedTable makeEmptyUnweightedTable()
{
UnweightedTable element;
element = (UnweightedTable)malloc(sizeof(struct UnweightedTable));
if(!element)
{
Error("out of space ,from func makeEmptyUnweightedTable");
return NULL;
}
element->known = 0; // 1 refers to accessed , also 0 refers to not accessed
element->distance = MaxInt;
element->path = -1; // index starts from 0
return element;
}
//allocate the memory for initializing unweighted table
UnweightedTable *initUnweightedTable(int size)
{
UnweightedTable* table;
int i;
table = (UnweightedTable*)malloc(sizeof(UnweightedTable) * size);
if(!table)
{
Error("out of space ,from func initUnweightedTable");
return NULL;
}
for(i = 0; i < size; i++)
{
table[i] = makeEmptyUnweightedTable();
if(!table[i])
return NULL;
}
return table;
}
//computing the unweighted shortest path between the vertex under initIndex and other vertexs
void unweighted_shortest_path(AdjTable* adj, int size, int startVertex, Queue queue)
{
int adjVertex;
UnweightedTable* table;
ElementType vertex;
AdjTable temp;
table = initUnweightedTable(size);
enQueue(queue, startVertex-1); //if let start vertex equals to v3, then initIndex=3 and let index=2 enter the queue
table[startVertex-1]->distance = 0;// update the distance
table[startVertex-1]->path = 0;// update the path of starting vertex
while(!isEmpty(queue))
{
vertex = deQueue(queue); // if the queue is not empty, conducting departing queue
table[vertex]->known = 1; // update the vertex as accessed, also responding known 1
temp = adj[vertex]->next;
while(temp)
{
adjVertex = temp->index; // let each adjVertex adjacent to vertex enter the queue
if(table[adjVertex]->path == -1) // key that judge whether corresponding element's path equals to -1 ,-1 means the element has never entered the queue
{
enQueue(queue, adjVertex);
table[adjVertex]->distance = table[vertex]->distance + 1;// update the distance
table[adjVertex]->path = vertex; //update the path of adjVertex, also responding path evaluated as vertex
}
temp = temp->next;
}
}
disposeQueue(queue);
//print unweighted table
printUnweightedtable(table, size, startVertex);
printf("\n\t");
}
//print unweighted table
void printUnweightedtable(UnweightedTable* table, int size, int startVertex)
{
int i;
int path;
char *str[4] =
{
"vertex",
"known",
"distance",
"path"
};
printf("\n\t unweighted shortest path table are as follows:\n");
printf("\n\t %6s%6s%9s%5s", str[0], str[1], str[2], str[3]);
for(i=0; i<size; i++)
{
if(i != startVertex-1)
printf("\n\t %-3d %3d %5d v%-3d ", i+1, table[i]->known, table[i]->distance, table[i]->path+1);
else
printf("\n\t *%-3d %3d %5d %-3d ", i+1, table[i]->known, table[i]->distance, 0);
}
}
int main()
{
AdjTable* adj;
Queue queue;
int size = 7;
int i;
int j;
int column = 4;
int startVertex;
int adjTable[7][4] =
{
{2, 4, 0, 0},
{4, 5, 0, 0},
{1, 6, 0, 0},
{3, 5, 6, 7},
{7, 0, 0, 0},
{0, 0, 0, 0},
{6, 0, 0, 0}
};
printf("\n\n\t ====== test for topological sorting with adjoining table ======\n");
adj = initAdjTable(size);
queue = initQueue(size);
printf("\n\n\t ====== the initial adjoining table is as follows:======\n");
for(i = 0; i < size; i++)
for(j = 0; j < column; j++)
if(adjTable[i][j])
insertAdj(adj, adjTable[i][j]-1, i); // insertAdj the adjoining table over
printAdjTable(adj, size);
// finding the unweighted shortest path starts
// void unweighted_shortest_path(AdjTable* adj, int size, int initIndex, Queue queue)
startVertex = 3; // we set the vertex3 as the start vertex (but you know, whose index in array is 2)
unweighted_shortest_path(adj, size, startVertex, queue);
return 0;
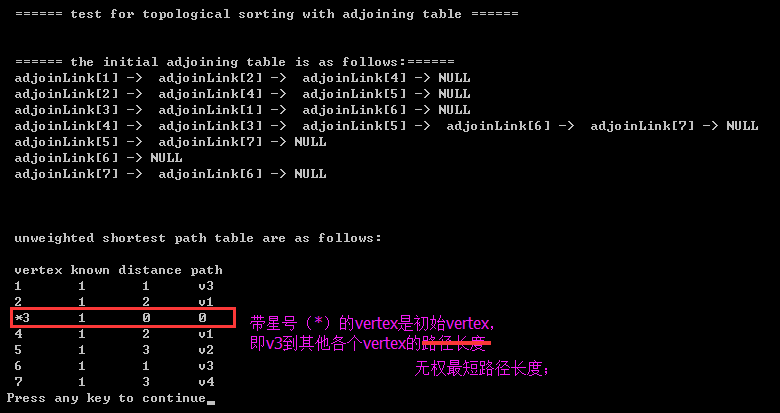
}4.3)printing results:

相关文章推荐
- Lua教程(七):数据结构详解
- 解析从源码分析常见的基于Array的数据结构动态扩容机制的详解
- C#数据结构揭秘一
- 数据结构之Treap详解
- JavaScript数据结构和算法之图和图算法
- Java数据结构及算法实例:冒泡排序 Bubble Sort
- Java数据结构及算法实例:插入排序 Insertion Sort
- Java数据结构及算法实例:考拉兹猜想 Collatz Conjecture
- java数据结构之java实现栈
- java数据结构之实现双向链表的示例
- Java数据结构及算法实例:选择排序 Selection Sort
- Java数据结构及算法实例:朴素字符匹配 Brute Force
- Java数据结构及算法实例:汉诺塔问题 Hanoi
- Java数据结构及算法实例:快速计算二进制数中1的个数(Fast Bit Counting)
- java数据结构和算法学习之汉诺塔示例
- Java数据结构及算法实例:三角数字
- Java数据结构之简单链表的定义与实现方法示例
- 数据结构之AVL树详解
- qqwry.dat的数据结构图文解释第1/2页
- JavaScript中数据结构与算法(五):经典KMP算法