STM32系统滴答_及不可不知的延时技巧 - (上)
2014-04-29 17:51
537 查看
我想每个单片机爱好者及工程开发设计人员都有过点灯的经历。流水灯是个好东西,尤其是在调试资源有限的环境中,有时会帮上大忙。
然在最初入门时,如何让这些小灯们按照我们的想法欢快地跑起来呢,绝大多数小朋友的做法是:在一个while循环里加上延时程序,让小灯在每个状态下停留一段时间,再进入下一个状态,这样小灯们就会在不同的状态中切换,就可以根据我们设计的程序闪烁了。
这样这里就会涉及到一个延时程序的编写的问题,而一般的做法是一个for循环里去减一个很大的数,直到为0,则延时完成,那个数的值则是根据时钟频率和指令运行周期,估算出来的,还记得较久以前看过一篇帖子介绍51单片机精确延时的几种方法,有一种方法是在keil中设定好时钟频率,然后通过软件仿真试来算延时时间,以达到较精确定时。
但这些方法一般都不够方便,延时也不够精确,更高阶一点的方法便是开一个定时器,在定时中断里面计数达到精确延时的目的。
在STM32的应用中,可考虑利用SysTick系统嘀嗒定时器来实现。但在STM32开发手册中对它的介绍却很少,几乎到没有的程度。因为它是Cortex内核的部分,CM3为它专门开出一个异常类型,并且在中断向量表中占有一席之地(异常号15),这样它可以很方便的移植到不同厂商出CM3内核的芯片上,并且对于有实时操作系统的软件,它一般会作为整个系统的时基,这个对操作系统非常重要。有关SysTick的详细介绍可参考《Cortex-M3 权威指南》第133 页第八章及第179页第十三章。
SysTick总共有四个寄存器:
1、
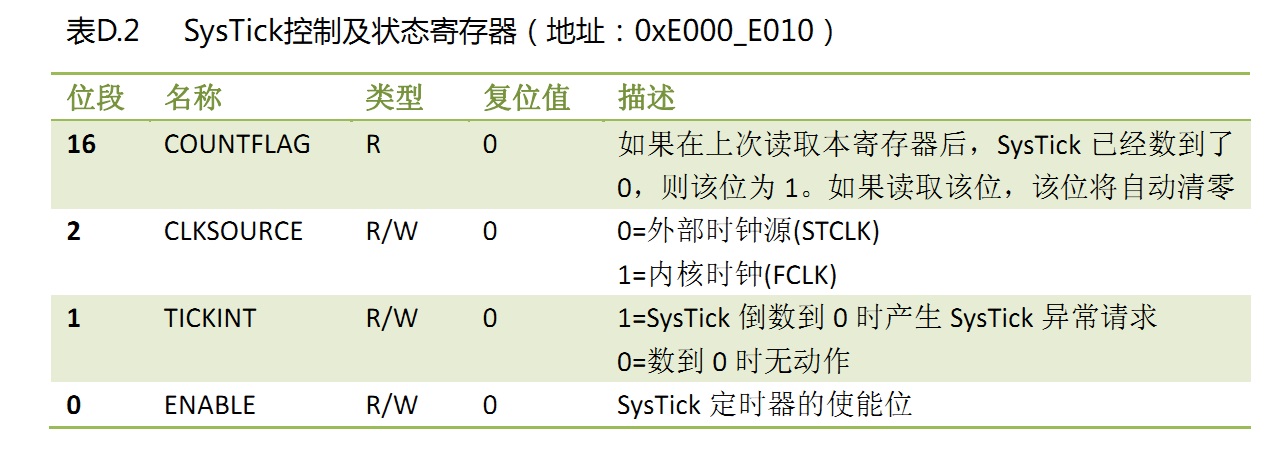
对应于软件中 SysTick->CTRL;
2、

对应于软件中 SysTick-> LOAD;
3、
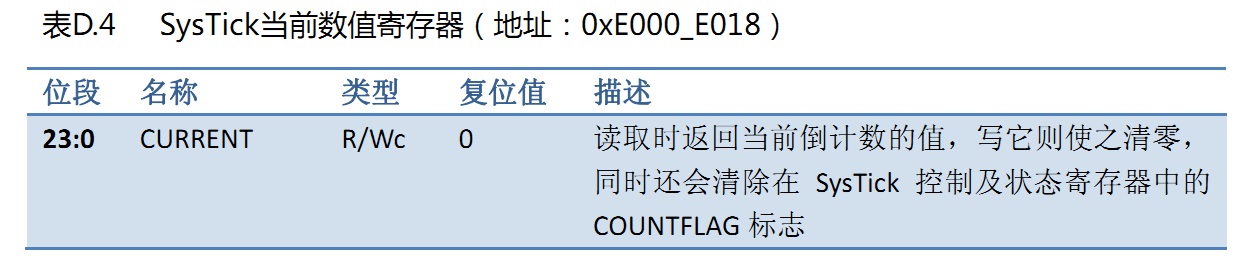
对应于软件中 SysTick-> VAL;
4、

对应于软件中 SysTick-> CALIB (如上图),没有用过,也不常用,暂不作介绍。
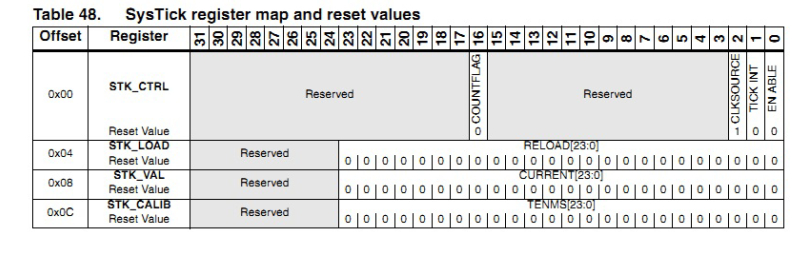
这几个寄存器的偏移量如下图所示:
寄存器结构体的定义在 \CMSIS\CM3\CoreSupport core_cm3.h中,如下
SysTick 是一个24 位的定时器,即一次最多可以计数 224个时钟脉冲,这个脉冲计数值被保存到SysTick->VAL 当前计数值寄存器中,它只能向下计数,每接收到一个时钟脉冲SysTick->VAL 的值就向下减 1,直至0,然后由硬件自动把重载寄存器SysTick->LOAD 中的值到SysTick->VAL重新计数,并且当SysTick->VAL值计数到0时,触发异常,调用void SysTick_Handler(void)函数,可以在此中断服务函数中处理定时中断事件了,一般是对设定值进行递减计数操作。只要不把它在SysTick控制及状态寄存器SysTick->CTRL中的第0位使能位清除,就永不停息。
SysTick 中断优先级问题这里需要强调下。
它属于系统异常,是内核级中断,并且优先级是可以设置的,具体设置也是在 core_cm3.h中
其中如下这句就是设置优先级的函数,此函数对内核中断优先级和外部中断优先级设置通吃,比较强大,但需要手动算出来抢占和从优先级,不太方便,当跳进此函数,我们可以算出Systick默认优先是最低的(效果相当于SCB->SHP[11] = 0xF0;)
此时若其它外部中断优先级设置比它高时,可以剥夺它进而转向外部中断。
可以做如下实验验证:
先设置一事件中断,把优先级设置高一些,
注:中断分组我在实验中,最初初始化设置为如下:
设为第二组。
在
系统滴答中断里触发外部中断事件,并点亮LED1 。
外部中断处理函数如下
此延时函数为阻塞延时如下:
加入延时是为了看出来哪个灯先亮。
当外部中断优先级比较高时,它可以抢占Systick中断先执行,以上代码实验结果为,LED0先点亮后,再回到LED1再点亮。
当把外部中断设置为与systick相同的优先级时,则systick优先级就会相对较高,例如把上面的优先级改为
则会LED1先亮,执行完SysTick_Handle函数后才轮到EXTI1_IRQHandler执行。
个人认为,若要实现systick精确延时,最好把systick优先级设置高一些,例如
即把SCB->SHP[11] = 0x00;则可达到systick优先级高于任合外部中断的效果,此时延时会比较精准。
另外对于SysTick的时钟源的选择,要注意它的时钟源可选择内部时钟(FCLK,CM3上的自由运行时钟,STM32中对应是AHB),或者是外部时钟( CM3处理器上的STCLK信号,STM32中对应是AHB/8)
可参考如下图
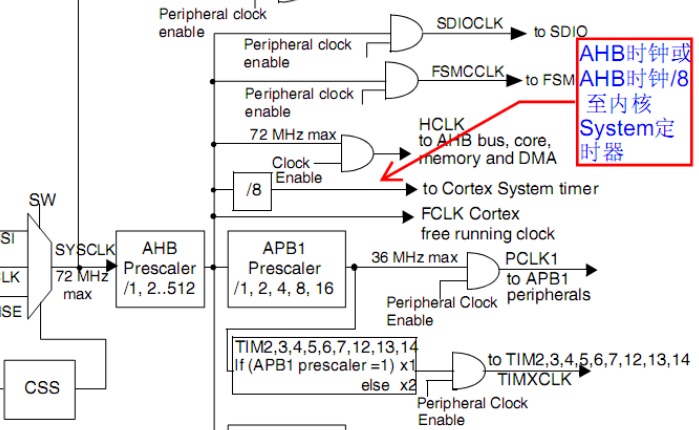
它是在SysTick->CTRL第二位CLKSOURCE时钟源选择中设置。
有关systick延时函数的编写可参考野火《零死角玩转stm32-初级篇》。
至此我们可以简单的实现一流水灯程序
然而这样做真的好吗 ?这里用的是 阻塞延时哦,CPU的效率很大一部分就耗在了空转上了,太浪费资源。
假设系统时钟频率为72MHZ或者几十上百MHZ时,当完成一个循环只需要几十或十几纳秒级或者更短,而在这个循环之中阻塞延时个几十至几百毫秒的话,就像是在高速公路上突然横出一条坑坑洼洼的泥泞路,那可想整条路都会因此而慢下来,甚至会出现灾难性的后果,个人认为,一般在系统初始化过程中,各芯片的时序对时间有要求,可以用下阻塞延时,只需要系统启动时运行一下,当系统跑起来之后,最好就别再傻呼呼的这么做了。
这时主要采用的是在定时器里计数,在外部循环中对变量查询,达到某个值时再执行某个动作,达到延时的效果,而在时间未到时,系统还可以不停的跑圈圈,做别的事情去。
gticks在定时中断里每毫秒计数一次
以上需要在事件处理过程中对gticks进行处理,增加了代码的耦合度,更容易出错,如果在一个事件处理中对gticks清除了,而下个事件中又需要查询它,这样就可能导致处理时序的错乱,相互干扰。
能否在事件处理中只提供查询功能,而定时的事情就交给定时自己去做?
下节高手将登场了,为大家介绍个我曾在一项目中学到的,非阻塞延时的精妙设计。

然在最初入门时,如何让这些小灯们按照我们的想法欢快地跑起来呢,绝大多数小朋友的做法是:在一个while循环里加上延时程序,让小灯在每个状态下停留一段时间,再进入下一个状态,这样小灯们就会在不同的状态中切换,就可以根据我们设计的程序闪烁了。
这样这里就会涉及到一个延时程序的编写的问题,而一般的做法是一个for循环里去减一个很大的数,直到为0,则延时完成,那个数的值则是根据时钟频率和指令运行周期,估算出来的,还记得较久以前看过一篇帖子介绍51单片机精确延时的几种方法,有一种方法是在keil中设定好时钟频率,然后通过软件仿真试来算延时时间,以达到较精确定时。
但这些方法一般都不够方便,延时也不够精确,更高阶一点的方法便是开一个定时器,在定时中断里面计数达到精确延时的目的。
在STM32的应用中,可考虑利用SysTick系统嘀嗒定时器来实现。但在STM32开发手册中对它的介绍却很少,几乎到没有的程度。因为它是Cortex内核的部分,CM3为它专门开出一个异常类型,并且在中断向量表中占有一席之地(异常号15),这样它可以很方便的移植到不同厂商出CM3内核的芯片上,并且对于有实时操作系统的软件,它一般会作为整个系统的时基,这个对操作系统非常重要。有关SysTick的详细介绍可参考《Cortex-M3 权威指南》第133 页第八章及第179页第十三章。
SysTick总共有四个寄存器:
1、
对应于软件中 SysTick->CTRL;
2、
对应于软件中 SysTick-> LOAD;
3、
对应于软件中 SysTick-> VAL;
4、
对应于软件中 SysTick-> CALIB (如上图),没有用过,也不常用,暂不作介绍。
这几个寄存器的偏移量如下图所示:
寄存器结构体的定义在 \CMSIS\CM3\CoreSupport core_cm3.h中,如下
/** @addtogroup CMSIS_CM3_SysTick CMSIS CM3 SysTick
memory mapped structure for SysTick
@{
*/
typedef struct
{
__IO uint32_t CTRL; /*!< Offset: 0x00 SysTick Control and Status Register */
__IO uint32_t LOAD; /*!< Offset: 0x04 SysTick Reload Value Register */
__IO uint32_t VAL; /*!< Offset: 0x08 SysTick Current Value Register */
__I uint32_t CALIB; /*!< Offset: 0x0C SysTick Calibration Register */
} SysTick_Type;SysTick 是一个24 位的定时器,即一次最多可以计数 224个时钟脉冲,这个脉冲计数值被保存到SysTick->VAL 当前计数值寄存器中,它只能向下计数,每接收到一个时钟脉冲SysTick->VAL 的值就向下减 1,直至0,然后由硬件自动把重载寄存器SysTick->LOAD 中的值到SysTick->VAL重新计数,并且当SysTick->VAL值计数到0时,触发异常,调用void SysTick_Handler(void)函数,可以在此中断服务函数中处理定时中断事件了,一般是对设定值进行递减计数操作。只要不把它在SysTick控制及状态寄存器SysTick->CTRL中的第0位使能位清除,就永不停息。
SysTick 中断优先级问题这里需要强调下。
它属于系统异常,是内核级中断,并且优先级是可以设置的,具体设置也是在 core_cm3.h中
/**
* @brief Initialize and start the SysTick counter and its interrupt.
*
* @param ticks number of ticks between two interrupts
* @return 1 = failed, 0 = successful
*
* Initialise the system tick timer and its interrupt and start the
* system tick timer / counter in free running mode to generate
* periodical interrupts.
*/
static __INLINE uint32_t SysTick_Config(uint32_t ticks)
{
if (ticks > SysTick_LOAD_RELOAD_Msk) return (1); /* Reload value impossible */
SysTick->LOAD = (ticks & SysTick_LOAD_RELOAD_Msk) - 1; /* set reload register */
NVIC_SetPriority (SysTick_IRQn, (1<<__NVIC_PRIO_BITS) - 1);
SysTick->VAL = 0;
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk |
SysTick_CTRL_TICKINT_Msk |
SysTick_CTRL_ENABLE_Msk;
return (0); /* Function successful */
}其中如下这句就是设置优先级的函数,此函数对内核中断优先级和外部中断优先级设置通吃,比较强大,但需要手动算出来抢占和从优先级,不太方便,当跳进此函数,我们可以算出Systick默认优先是最低的(效果相当于SCB->SHP[11] = 0xF0;)
NVIC_SetPriority (SysTick_IRQn, (1<<__NVIC_PRIO_BITS) - 1);
此时若其它外部中断优先级设置比它高时,可以剥夺它进而转向外部中断。
可以做如下实验验证:
先设置一事件中断,把优先级设置高一些,
void Exti_Config(void)
{
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line1;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Event;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}注:中断分组我在实验中,最初初始化设置为如下:
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
设为第二组。
在
void SysTick_Handler(void)
{
EXTI_GenerateSWInterrupt(EXTI_SWIER_SWIER1);
LED_1 = ON;
Delay();
}系统滴答中断里触发外部中断事件,并点亮LED1 。
外部中断处理函数如下
void EXTI1_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line1) != RESET)
{
EXTI_ClearITPendingBit(EXTI_Line1);
LED_0 = ON;
Delay();
}
}此延时函数为阻塞延时如下:
void Delay(void)
{
u32 i;
for(i=0 ; i < 0xFFFFF; i++){}
}加入延时是为了看出来哪个灯先亮。
当外部中断优先级比较高时,它可以抢占Systick中断先执行,以上代码实验结果为,LED0先点亮后,再回到LED1再点亮。
当把外部中断设置为与systick相同的优先级时,则systick优先级就会相对较高,例如把上面的优先级改为
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
则会LED1先亮,执行完SysTick_Handle函数后才轮到EXTI1_IRQHandler执行。
个人认为,若要实现systick精确延时,最好把systick优先级设置高一些,例如
NVIC_SetPriority (SysTick_IRQn, 0);
即把SCB->SHP[11] = 0x00;则可达到systick优先级高于任合外部中断的效果,此时延时会比较精准。
另外对于SysTick的时钟源的选择,要注意它的时钟源可选择内部时钟(FCLK,CM3上的自由运行时钟,STM32中对应是AHB),或者是外部时钟( CM3处理器上的STCLK信号,STM32中对应是AHB/8)
可参考如下图
它是在SysTick->CTRL第二位CLKSOURCE时钟源选择中设置。
有关systick延时函数的编写可参考野火《零死角玩转stm32-初级篇》。
至此我们可以简单的实现一流水灯程序
while(1)
{
LED_0 =OFF;
LED_1 = ON;
Delay_ms(500);
LED_0 =OFF;
LED_1 = ON;
Delay_ms(500);
}然而这样做真的好吗 ?这里用的是 阻塞延时哦,CPU的效率很大一部分就耗在了空转上了,太浪费资源。
假设系统时钟频率为72MHZ或者几十上百MHZ时,当完成一个循环只需要几十或十几纳秒级或者更短,而在这个循环之中阻塞延时个几十至几百毫秒的话,就像是在高速公路上突然横出一条坑坑洼洼的泥泞路,那可想整条路都会因此而慢下来,甚至会出现灾难性的后果,个人认为,一般在系统初始化过程中,各芯片的时序对时间有要求,可以用下阻塞延时,只需要系统启动时运行一下,当系统跑起来之后,最好就别再傻呼呼的这么做了。
这时主要采用的是在定时器里计数,在外部循环中对变量查询,达到某个值时再执行某个动作,达到延时的效果,而在时间未到时,系统还可以不停的跑圈圈,做别的事情去。
gticks在定时中断里每毫秒计数一次
while(1)
{
if(500 == gticks)
{
LED_0 =OFF;
LED_1 = ON;
}
if(1000 == gticks)
{
LED_0 =OFF;
LED_1 = ON;
gticks = 0
}
Do_others();
}以上需要在事件处理过程中对gticks进行处理,增加了代码的耦合度,更容易出错,如果在一个事件处理中对gticks清除了,而下个事件中又需要查询它,这样就可能导致处理时序的错乱,相互干扰。
能否在事件处理中只提供查询功能,而定时的事情就交给定时自己去做?
下节高手将登场了,为大家介绍个我曾在一项目中学到的,非阻塞延时的精妙设计。

相关文章推荐
- STM32系统滴答_及不可不知的延时技巧 - (下)
- STM32系统滴答_及不可不知的延时技巧 - (上)
- STM32系统滴答_及不可不知的延时技巧
- 12个不可不知的Sublime Text应用技巧和诀窍
- 12个不可不知的Sublime Text应用技巧和诀窍
- 你不可不知的HTML优化技巧
- 不可不知的:iOS开发的22个诡异技巧
- 【STM32】STM32之系统滴答定时器
- PHP开发中不可不知的技巧
- Sublime不可不知的实用技巧
- 12个不可不知的Sublime Text应用技巧和诀窍
- 如何收藏互联网上的任意网页到系统某个分类下,之后进行批量导出发布等---博客备份专家的博文收藏功能您不可不知
- 看“十四条不可不知的手机电池充电技巧”想到的
- STM32---系统滴答定时器(systick)应用
- STM32之SysTick(系统滴答定时器)
- STM32---系统滴答定时器(systick)应用
- 12个不可不知的Sublime Text应用技巧和诀窍
- 不可不知的12则Photoshop文本操作技巧
- 你不可不知的HTML优化技巧
- 不可不知的HTML优化技巧