D3D编程必备的数学知识(5)
2008-03-16 13:22
405 查看
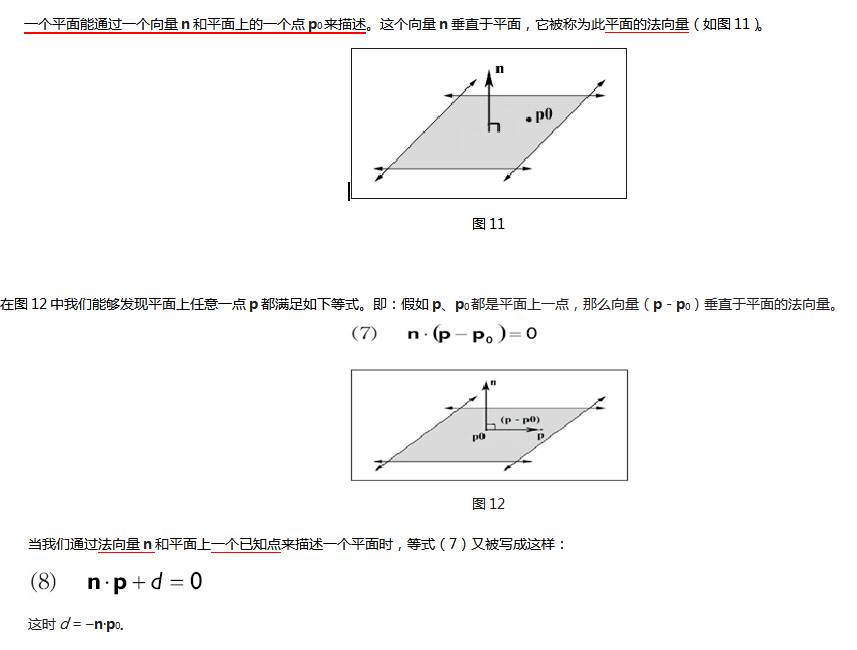
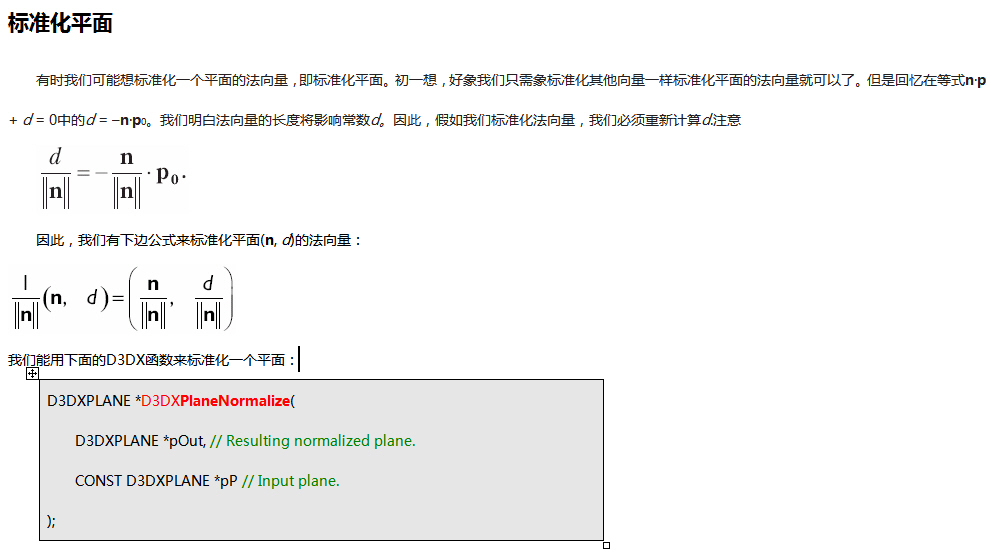
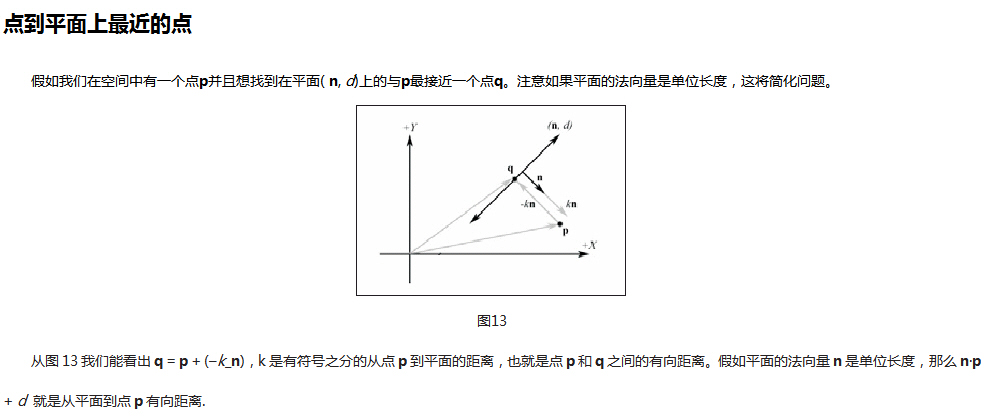
平面
D3DX平面
在代码中描述一个平面:仅仅需要一个法向量n和常数d就可以了。因此我们就使用一个4D向量(我们记录成(n, d))来实现它。D3DX库中用如下的结构来定义一个平面:typedef struct D3DXPLANE
{
#ifdef __cplusplus
public:
D3DXPLANE() {}
D3DXPLANE( CONST FLOAT* );
D3DXPLANE( CONST D3DXFLOAT16* );
D3DXPLANE( FLOAT a, FLOAT b, FLOAT c, FLOAT d );
// casting
operator FLOAT* ();
operator CONST FLOAT* () const;
// unary operators
D3DXPLANE operator + () const;
D3DXPLANE operator - () const;
// binary operators
BOOL operator == ( CONST D3DXPLANE& ) const;
BOOL operator != ( CONST D3DXPLANE& ) const;
#endif //__cplusplus
FLOAT a, b, c, d;
} D3DXPLANE, *LPD3DXPLANE;对照等式(8)可知:这里a, b和c是平面法向量n的成员,d就是那个常数。
点和平面的空间关系
我们判定点和平面的关系主要是利用等式(8)来实现。例如,假设平面(n, d),我们能判定点p和平面的关系:假如n·p + d = 0,那么点p与平面共面。
假如n·p + d >0,那么点p在平面的前面且在平面的正半空间里。
假如n·p + d <0,那么点p在平面的背面且在平面的负半空间里。
下边的D3DX函数就是利用n·p + d 来判定点和平面的关系的函数:
FLOAT D3DXPlaneDotCoord(
CONST D3DXPLANE *pP, // 平面
CONST D3DXVECTOR3 *pV // 点
);
// 测试点相对于平面的位置
D3DXPLANE p(0.0f, 1.0f, 0.0f, 0.0f);
D3DXVECTOR3 v(3.0f, 5.0f, 2.0f);
float x = D3DXPlaneDotCoord( &p, &v );
if( x approximately equals 0.0f ) // v在平面.上
if( x > 0 ) // v在正半空间
if( x < 0 ) // v在负半空间
创建平面
我们能通过两种方法创建平面。第一种方法,直接用指定法线和点创建平面。假设法线n和在平面上的已知点p0,我们就能求出d:
n·p0+ d = 0
n·p0 = -d
-n·p0 = d
D3DX库提供如下函数来完成创建平面的任务:
D3DXPLANE *D3DXPlaneFromPointNormal(
D3DXPLANE* pOut, // Result.
CONST D3DXVECTOR3* pPoint, // Point on the plane.
CONST D3DXVECTOR3* pNormal // The normal of the plane.
);
第二种方法,我们能通过在平面上的3个点创立一个平面。
假如有点p0, p1, p2,那么我们就能得到平面上的两个向量:
u = p1 - p0
v = p2 - p0
因此我们能通过把平面上的两个向量进行叉乘得到平面的法线。回忆左手坐标系。
n = u × v
Then, -(n · p0) = d.
D3DX库提供如下函数来完成通过同一平面上的3个点确定一个平面:
D3DXPLANE *D3DXPlaneFromPoints(
D3DXPLANE* pOut, // Result.
CONST D3DXVECTOR3* pV1, // Point 1 on the plane.
CONST D3DXVECTOR3* pV2, // Point 2 on the plane.
CONST D3DXVECTOR3* pV3 // Point 3 on the plane.
);
变换平面
我们能够通过如下处理来变换一个面(n, d),就象一个4D向量通过乘以它所期望的变换矩阵的逆矩阵一样来达到变换目的。注意平面的法向量必须首先被标准化。我们能用下面的D3DX函数来完成操作:
D3DXPLANE *D3DXPlaneTransform(
D3DXPLANE *pOut, // Result
CONST D3DXPLANE *pP, // Input plane.
CONST D3DXMATRIX *pM // Transformation matrix.
);
示例代码:
D3DXMATRIX T(...); // Init. T to a desired transformation.
D3DXMATRIX inverseOfT;
D3DXMATRIX inverseTransposeOfT;
D3DXMatrixInverse( &inverseOfT, 0, &T );
D3DXMatrixTranspose( &inverseTransposeOfT, &inverseOfT );
D3DXPLANE p(...); // Init. Plane.
D3DXPlaneNormalize( &p, &p ); // make sure normal is normalized.
D3DXPlaneTransform( &p, &p, &inverseTransposeOfT );
射线(可选的)
设想在游戏中的一个玩家,正用他的枪射击敌人。我们怎么判断子弹是否从一个位置击中另一个位置的目标?一个方法是用一条射线模拟子弹,用一个球体模型模拟敌人。(球体模型只是一个球体,它紧紧的围绕一个物体,从而粗略地表示它的大小。球体模型将在第11章中做更详细的介绍。)那么通过计算我们就能够判定是否射中球体。在这部分我们学习射线的数学模型。射线
一条射线能用一个起点和方向来描述。射线的参数方程是: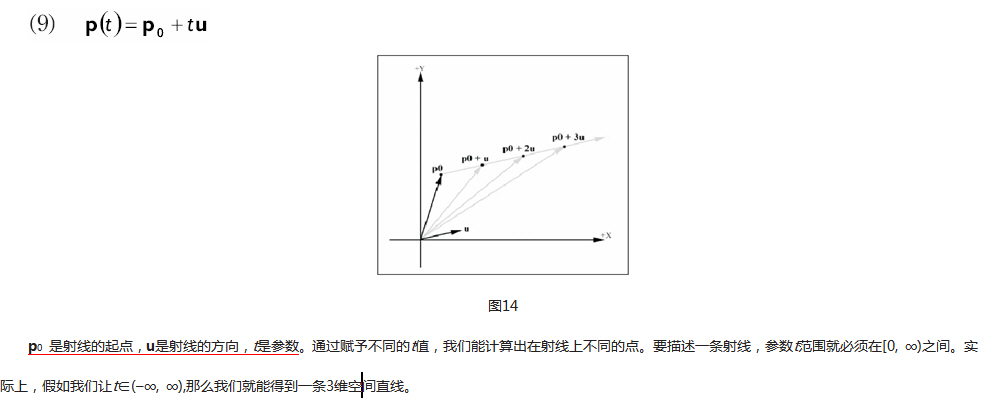
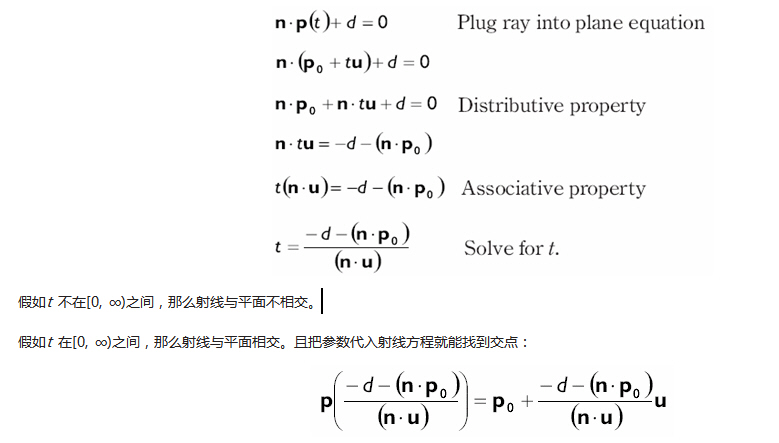
线/面相交
假设一条射线p(t) = p0 + tu 和 一个平面n·p + d = 0,我们想知道射线是否与平面相交,以及相交的交点信息(如果相交的话)。照这样做,我们把射线代入平面方程并且求满足平面方程的参数t,解答出来的参数就是相交的点。把等式(9)代入平面方程:

相关文章推荐
- D3D编程必备的数学知识(5)
- D3D编程必备的数学知识(1)
- D3D编程必备的数学知识(3)
- D3D编程必备的数学知识(1)
- D3D编程必备的数学知识(3)
- D3D编程必备的数学知识(2)
- D3D编程必备的数学知识(4)
- D3D编程必备的数学知识(3)
- D3D编程必备的数学知识(3)
- D3D编程必备的数学知识(5)
- D3D编程必备的数学知识(2)
- D3D编程必备的数学知识(3)
- D3D编程必备的数学知识(2)
- D3D编程必备的数学知识(5)
- D3D编程必备的数学知识(1)
- D3D编程必备的数学知识(2)
- D3D编程必备的数学知识(1)
- D3D编程必备的数学知识(5)
- D3D编程必备的数学知识(1)
- D3D编程必备的数学知识(2)